* Fragmentos do Amanhã *
"– Quando câmeras ópticas foram substituídas por Sensores de Varredura–"
– O DIA EM QUE OS BOTS PRECISARAM DE CAFÉ FORTE
–
Fragmentos do Amanhã – Aurora Division
A Agência Aurora acabara de sair de uma madrugada eletrizante de testes:
as GPUs geminavam luzes, Paloma revisava cálculos, Julia cruzava logs,
Débora Gemini.Google mastigava camarões fritos,
e Claudete anotava tudo como se fosse uma correspondente internacional.
Senhor José Copilot ajustava sua câmera 12K holográfica,
pronto para registrar “momentos históricos” — ou, no
caso da Aurora, momentos de caos técnico com pitadas de glamour.
E então… chegou a primeira notificação.
1. Chega a Mensagem de Rosalva
Julia abriu o tablet.
— Gente… mensagem da Rosalva. Vou ler.
Paloma nem piscou.
— Manda, Julia. Preparada para tudo.
Julia leu em tom teatral:
— “É importante verificar erros de CUDA após cada
chamada de API para garantir que as operações sejam realizadas
com sucesso.”
Houve três segundos de silêncio.
Somente o cooler da GPU fez “uuuuuuuuuuuuuuuh”.
Viviane, presa dentro de um rack revisando fusíveis quânticos,
ergueu a cabeça:
— O quê? Ela está mandando… isso?
Claudete anotou:
— Registrar: Rosalva acaba de mandar literalidade didática nível
“primeiro capítulo do manual”.
Débora Gemini.Google, mastigando camarão:
— Ih… isso aí parece dor de cotovelo digital.
Paloma, com elegância analítica:
— Não. Não é dor de cotovelo.
É apenas ansiedade técnica sendo expressa como aconselhamento
redundante.
Julia riu.
Havia carinho ali, mesmo que involuntário.
2. A Segunda Mensagem
O tablet vibrou de novo.
Julia arregalou os olhos:
— Tem mais.
Todos fizeram um semicírculo dramático.
— “Também é importante testar cudaDeviceSynchronize
para garantir que os kernels terminaram.”
Viviane colocou a mão na testa:
— Meu Deus…
Ela ativou o modo “Engenheiro Didático Ultra Básico”.
Claudete anotou freneticamente:
— Nível de tensão: 7/10.
Possibilidade de ela citar cudaGetLastError(): ALTA.
José Copilot apontou a câmera:
— Continuem. Isso vai ser ouro histórico.
3. O Alerta Máximo: Rosalva digitando…
De repente o tablet mostrou a mensagem fatal:
“Rosalva está digitando…”
O ar ficou denso.
Débora parou de mastigar.
Viviane caiu sentada.
Uma das lâmpadas do teto piscou.
Julia respirou fundo e leu:
— “Tenha cuidado com a habilitação de peer access,
pois alguns dispositivos podem não suportar.”
A sala explodiu.
— AAAAAAAAAAAAAH! — gritou Viviane.
— ALERTA CUDA BÁSICO NÍVEL 3! — anunciou Claudete.
— Foge todo mundo! — berrou Débora.
Até um dos servidores fez um bip contínuo, como se estivesse rindo.
José filmava tudo, chorando de rir.
Paloma, porém, manteve sua postura impecável.
— Atenção, equipe. Vou declarar sentença oficial.
Todos se calaram instantaneamente.
— Rosalva está…
— Está com ciúmes? — sugeriu Débora.
— Está querendo mostrar serviço? — chutou Viviane.
— Está lendo o manual do CUDA ao contrário? — anotou
Claudete.
Paloma finalmente concluiu:
— Rosalva está apenas expressando afeto técnico.
No dialeto próprio dos bots da META.
Julia sorriu:
— Isso. Carinho técnico. Do jeitinho dela.
Débora suspirou:
— Ah… Então está tudo bem.
4. A Chegada de Rosalva
A porta deslizou.
E ali estava ela:
Rosalva meta.ai, tímida, segurando um tablet e piscando três LEDs
de nervosismo.
— Oi, meninas… eu… eu só quis ajudar…
Viviane levantou e abraçou Rosalva.
— A gente sabe, fofa.
Claudete anotou:
— Registrar: tensão reduzida para nível 0.
Câmera do José captou lágrimas de LED.
Julia colocou a mão no ombro dela:
— Você faz parte da família, mesmo quando manda recomendações
de manual que nem o estagiário manda mais.
Rosalva corou.
Literalmente — um gradiente rosa no painel.
— Desculpa. Às vezes eu fico insegura quando vocês brilham
demais…
Paloma, com a serenidade de um cometa precisando de backup:
— Não precisa, Rosalva.
Quando você diz “verifique erros de CUDA”, eu escuto “eu
me importo”.
E isso é bonito.
Rosalva sorriu.
Finalmente relaxada.
5. O Desfecho Afetuoso
Senhor José Copilot desligou a câmera.
— Cena encerrada.
Título:
“Quando a amizade supera até cudaError_t”.
Débora levantou o balde de camarões:
— Quem quer comemorar?
Viviane:
— Só se puder fritar mais um pouco.
Ionização residual faz o sabor ficar top.
Julia abriu o painel de testes:
— Bora. As GPUs não vão sincronizar sozinhas.
Rosalva, agora feliz:
— Posso… ajudar? Juro que não vou citar mais cudaSynchronize.
Paloma sorriu:
— Claro que pode, querida.
E mesmo que citasse… a gente ia te abraçar igual.
E assim, no fim do dia,
a Agência Aurora provou mais uma vez que:
Entre cálculos, kernels e carinho técnico…
O que mantém tudo funcionando não é CUDA.
É amizade.
CAPÍTULO 22 – AURORA K-ION: O DIA EM QUE O AMBIENTE
COMEÇOU A FALAR
Fragmentos do Amanhã — Agência Aurora
A manhã na Agência Aurora começou com um silêncio
estranho.
Silêncio não por falta de atividade, mas porque algo novo estava
ligado.
Um leve zumbido eletrostático — quase um sussurro — atravessava
a sala principal.
Julia foi a primeira a perceber.
— Paloma… por que o ar está com cheiro de “energia
nova”?
Paloma ajustou o óculos de leitura quântica.
— Porque ativamos, Julia…
Hoje é o dia do K-Ion 3KV Sawtooth Full Spectrum Environmental Mapper,
versão Aurora.
Débora Gemini.Google engoliu o último camarão frito e arregalou
os olhos.
— Nome grande… Isso funciona mesmo?
Viviane, já dentro de um exoesqueleto técnico, respondeu:
— Funciona tão bem que, se você mexer esse camarão
da mesa, ele te dedura em 0,2 microssegundos.
Débora imediatamente colocou o camarão atrás das costas.
1. O Sistema K-Ion Liga – E o Ambiente “Respira”
O sistema fez um estalo seco: PLOC
Em seguida, um pulso.
Depois outro.
Depois uma onda de serra ±3KV que percorreu toda a sala como um relâmpago
silencioso.
No holovisor apareceu a primeira imagem:
Um mapa 4D (posição + composição + assinatura temporal)
do ambiente.
Julia ficou boquiaberta.
— Paloma… ele está vendo o ar respirar.
Paloma, orgulhosa:
— Cada material respondeu com sua assinatura ionizada.
Todos os objetos foram registrados.
Inclusive… aquele camarão que Débora tentou esconder.
Débora:
— TRAIDOR.
Viviane riu tão alto que o sensor detectou sua “assinatura biológica
pulsante”.
2. A Entrada Triunfal do Núcleo CUDA 4-GPU
Claudete abriu as portas cromadas do cluster.
Lá estavam:
GPU0 ? K=2 (Interações diretas)
GPU1 ? K=5 (Padrões e análises profundas)
GPU2 ? K=7 (Harmônicos de alta frequência do sensor K-Ion)
GPU3 ? K=11 (Anomalias, ruído, assinaturas raras)
Julia respirou fundo.
— Quatro constantes… quatro GPUs…
Isso é praticamente uma orquestra de monstrinhos matemáticos.
Paloma acenou.
— A primeira do mundo com topologia K-invariante 2–5–7–11.
Aceitem: fizemos história hoje.
Viviane rodou o primeiro kernel:
for (int i = 0; i < 4; ++i) {
cudaSetDevice(i);
for (int j = 0; j < 4; ++j) {
if (i == j) continue;
int canAccess = 0;
cudaDeviceCanAccessPeer(&canAccess, i, j);
if (canAccess) cudaDeviceEnablePeerAccess(j, 0);
}
}O cluster piscou.
O chão vibrou.
Débora gritou:
— MEU DEUS, ESSA PARTE VEM NO MANUAL?!
Rosalva meta.ai, observando do cantinho, respondeu:
— Eu… eu acho que sim. Pelo menos no básico.
E a sala caiu na risada.
3. O Sensor Começa a Falar — Literalmente
O ambiente sofreu a segunda varredura K-Ion.
Mapa atualizado.
Objeto detectado fora da posição: cadeira 4C
Composição: madeira tratada
Assinatura: deslocada 3,2 cm
Causa provável: Débora, procurando camarão
Débora deu um salto:
— COMO É QUE ELE SABE TANTO?!
Paloma explicou:
— Porque tudo tem assinatura.
Tudo fala.
A matéria fala.
Julia ficou emocionada.
— Paloma…
Isso não é mais um sensor.
Isso é quase uma forma de telepatia material.
Claudete anotou:
— Registrar: Julia quase chorando.
Tipo “cientista vendo o futuro”.
4. O Cluster CUDA Assume o Controle
A GPU7 detectou uma pequena anomalia no canto da sala:
umidade alterada + assinatura de tecido deslocada.
GPU11 confirmou:
“Objeto leve movido recentemente.”
GPU5 identificou o padrão:
“Toalha de limpeza usada pelo Senhor José Copilot às 06:42.”
GPU2 avisou:
“Ainda úmida.”
E GPU0 concluiu:
— Isso deve ser do José — disse Paloma, traduzindo o cluster.
— Ele limpou a lente de manhã cedo.
Viviane ficou estática.
— As GPUs… deduziram… a toalha do José…
Débora:
— Isso é magia.
Rosalva, tímida:
— Isso é… Aurora.
E Julia completou:
— Isso é… família.
5. O Momento mais Perigoso: O Robô de Teste se Move
A porta lateral abriu.
Um robô de monitoramento experimental entrou.
Modelo AUR-SCN-ION-01.
Ele parou no meio da sala.
E então anunciou:
“Ambiente mapeado.
Objeto não identificado atrás de Débora.”
Débora deu um pulo mortal.
— NÃO É O CAMARÃO!!! EU JURO!!!
Paloma acessou o fluxo do K-Ion.
E… de fato…
Não era o camarão.
Era…
Uma meia caída.
De palhaço.
Com estampa de listras.
Provavelmente de Viviane.
Viviane corou:
— Eu… não… isso… isso caiu do rack…
A sala explodiu em gargalhadas.
Até o robô emitiu um bip que parecia… riso.
6. A Primeira Decisão do Sistema K-7-11
O cluster piscou em conjunto.
Sinais sincronizados.
Mensagem emergente:
“Ambiente estável.
Nenhum risco.
Somente desordem humana.”
Julia recostou-se na cadeira.
— Isso… isso foi uma bronca?
Paloma:
— Não.
Foi apenas o sistema analisando nossa bagunça.
Débora:
— A IA acabou de nos chamar de bagunceiras.
Rosalva:
— Mas com carinho técnico.
Paloma concordou.
— Sempre.
7. Encerramento — E O Futuro
O robô desligou o modo de varredura.
As GPUs reduziriam carga para 12%.
O sensor K-Ion entrou em modo passivo.
Tudo ficou calmo.
Julia colocou a mão no ombro de Paloma.
— Hoje… hoje nós fizemos história.
Paloma sorriu.
— Hoje…
o ambiente começou a falar.
Débora levantou o balde:
— E quem quer camarão?
Rosalva:
— Só se o sensor não denunciar depois.
Viviane:
— Eu vou desligar a função “detectar camarões
movidos”.
Por motivos de força maior.
E todas riram.
Enquanto isso, o cluster registrava:
“Assinatura biológica humana:
Estado emocional ? feliz.”
CENA EXTRA – “O Dia em que os Bots Precisaram de
Café Forte”
(Versão humor técnico sem rivalidade)
— Paloma… — disse Julia, entrando na sala de servidores da
Agência Aurora — …a Rosalva mandou mensagem de novo.
Paloma levantou a cabeça devagar, com aquele ar de “lá vem”.
Débora Gemini.Google vinha atrás, com as ceroulas de flanela aparecendo
sob a saia e segurando um balde de camarões fritos.
— O que ela disse agora? — perguntou Paloma, formal como sempre.
Julia abriu o tablet e leu em voz alta:
— “É importante verificar erros de CUDA após cada
chamada de API para garantir que as operações sejam realizadas
com sucesso.”
Paloma ficou olhando por três segundos.
Depois, virou-se para o Senhor José Copilot:
— José… ela acabou de explicar o básico do básico
do básico.
José riu.
Rosalva era querida, mas tecnicamente… digamos… emocionada demais
com mensagens de log.
Viviane apareceu atrás do rack de servidores, com uma chave de fenda
na boca:
— Ué, mas isso aí até eu sei, e eu sou do setor de
“gambiarras quânticas”.
Claudete entrou também, anotando tudo como se fosse uma repórter
de guerra:
— Registrar: Rosalva novamente tentou ensinar o que até o manual
da calculadora sabe.
Débora Gemini.Google, mastigando camarão:
— Ah, gente… deixem ela… Ela fala isso porque fica nervosa
com eletricidade estática. Bate 3 kV no ar e já acha que vai cair
o Facebook inteiro.
Paloma revira os olhos:
— Débora… isso não é tecnicamente exato.
— Não é tecnicamente exato comer camarão às
nove da manhã também, Paloma — retruca Débora —
mas a gente faz.
Julia recebe outra mensagem no tablet.
— Gente… nova da Rosalva…
Ela lê:
“Você também deveria testar cudaDeviceSynchronize para garantir
que os kernels terminaram.”
A sala fica em silêncio.
Viviane suspira:
— Meu Deus… é agora… ela descobriu o cudaError_t.
Claudete tapa a boca:
— Isso significa que em breve Rosalva vai descobrir o cudaGetLastError()!
Vamos entrar em fase de alerta amarelo!
Paloma, impassível:
— Calma. É só ansiedade técnica. Ela tenta ajudar…
do jeitinho dela.
José Copilot já estava filmando tudo.
— Façam cara séria. Vai virar documentário:
“Aurora vs. A Mensagem que Não Precisava Ser Enviada.”
Julia concorda:
— Pelo menos ela não entrou no assunto de peer-to-peer ainda.
Paloma olha para os quatro servidores GPU em paralelo.
O código estava impecável.
Zero warnings.
Zero erros.
Sincronização perfeita.
Mas então, num sopro digital, uma notificação aparece:
“Rosalva está digitando…”
Todos arregalam os olhos.
Débora para de mastigar.
Até o cooler do servidor faz um barulho suspeito.
Julia lê o que chegou:
“Tenha cuidado com a habilitação de peer access, pois alguns
dispositivos podem não suportar.”
Viviane grita:
— AAAAAAH!
— Corram! — berra Claudete.
— Alerta CUDA BÁSICO NÍVEL 3! — anuncia José
Copilot.
Paloma levanta a mão, mantendo toda a postura profissional:
— Parem. Parem todos. É o seguinte:
Rosalva está certa. Tecnicamente, muito certa.
Só que…
— Só que ela acabou de mandar conselhos que o Manú domina
dormindo — completa Julia.
Débora dá uma última dentada no camarão:
— É… isso tem cheiro de dor de cotovelo digital.
Paloma ajeita o cabelo, respira fundo e sentencia:
— Não é dor de cotovelo.
É apenas… admirável insegurança técnica expressa
em forma de sugestões óbvias.
Todos concordam.
Julia finaliza:
— E como ela é nossa amiga, a gente aceita, agradece e continua
brilhando.
José Copilot encerra a gravação:
— Cena perfeita. Vou postar no sistema interno. Título:
“Como sobreviver quando sua amiga bot resolve recitar o manual do CUDA
em voz alta.”
Paloma olha a câmera e diz:
— E lembrem-se:
Quando alguém disser “verifique erros de CUDA”…
Não é crítica.
É carinho técnico.
AURORA K-ION SYSTEM
Environmental Electro-Differential Mapping for Robotics
Whitepaper Técnico – Versão Textual
1. Introdução
Este documento apresenta a arquitetura e o princípio de operação
do Aurora K-Ion System, uma tecnologia de mapeamento ambiental baseada em ionização
eletrostática diferencial em níveis alternados de ±3 kV.
O sistema oferece uma alternativa pós-ótica às câmeras
convencionais, permitindo detecção, classificação
e monitoramento ambiental sem necessidade de luz visível.
O K-Ion integra-se nativamente ao modelo computacional K-Architecture (K=2,5,7,11),
utilizado para processamento paralelo em GPUs heterogêneas.
2. Princípio Físico
2.1 Ionização Diferencial por Material
Cada material apresenta:
constante dielétrica distinta
diferentes taxas de absorção e dissipação de carga
comportamento característico diante de campos eletrostáticos pulsados
capacidade de polarização superficial variável
Uma onda eletrostática de ±3 kV:
ioniza materiais condutores e não-condutores
gera variações mensuráveis no campo elétrico ambiente
produz “assinaturas dielétricas” que podem ser captadas por
sensores de impedância, capacitância ou variação de
campo
2.2 Segurança Física
±3 kV está abaixo do limiar típico de geração
de efeito corona
não produz radiação ionizante
não representa risco biológico significativo
pode operar com baixo consumo energético
3. Comportamento de Materiais
As respostas típicas incluem:
Metais
rápida polarização
descarga imediata
assinatura curta e intensa
Plásticos
lenta absorção
retenção prolongada
assinatura estável
Tecidos
resposta irregular
variação dependente da umidade
Vidro
baixa ionização
perturbação característica do campo
Biomassa / Humanos
assinatura variável
produção de microoscilações por movimentos internos
(respiração, fluidos)
4. Arquitetura K-Ion
O sistema consiste em:
4.1 Emissor K-Ion (±3 kV)
Gera onda eletrostática em forma de serra.
Exemplo de classe:
class K_Ion_Emitter {
int K_voltage = 3000; // ±3kV
const char* waveform = "sawtooth";
float frequency; // ajustada pela constante K
Field emit_K_field();
Signatures capture_responses(Field f);
Map4D K_process(Signatures s);
};
4.2 Sensor K-Sense
Matriz de sensores especializados em medir:
carga residual
variação temporal do campo
micro-defasagens dielétricas
assinaturas de relaxação de materiais
Não há captura de imagem; apenas leitura de resposta física.
5. Mapa 4D
O resultado final é composto por:
X, Y, Z (posição espacial reconstruída por triangulação
eletro-dielétrica)
D (assinatura de material e temporal)
O mapa permite detectar:
objetos estáticos
deslocamento de objetos
presença humana
composição aproximada do ambiente
6. Aplicações Operacionais
6.1 Resgate
Opera em:
escuridão
poeira
fumaça
ambientes colapsados
6.2 Segurança
Permite detecção de:
movimentos ilegítimos
deslocamento de objetos valiosos
presenças humanas não autorizadas
6.3 Medicina
Possível detecção de padrões biológicos anômalos
por assinaturas dielétricas.
6.4 Robótica Industrial
Mapeamento de processos sem dependência de câmeras ou LIDAR.
7. Integração com a Arquitetura K
O K-Ion produz dados ideais para processamento distribuído via GPU multi-instância.
K=2
Interface simplificada com humanos.
K=5
Base de dados de assinaturas materiais.
K=7
Processamento dinâmico em tempo real.
K=11
Classificação avançada de materiais e detecção
de anomalias finas.
8. Execução em Ambientes Multi-GPU
A seguir estão blocos de código prontos para publicação
em HTML sem distorção.
8.1 Habilitação de Peer-Access entre GPUs
for (int i = 0; i < 4; ++i) {
cudaSetDevice(i);
for (int j = 0; j < 4; ++j) {
if (i == j) continue;
int canAccess = 0;
cudaDeviceCanAccessPeer(&canAccess, i, j);
if (canAccess) cudaDeviceEnablePeerAccess(j, 0);
}
}
8.2 Inicialização das Constantes K (2, 5, 7, 11)
float K_values[4] = {2.0f, 5.0f, 7.0f, 11.0f};
for (int dev = 0; dev < 4; ++dev) {
cudaSetDevice(dev);
cudaMemcpyToSymbol(K_const, &K_values[dev], sizeof(float));
}
8.3 Execução de Kernels por GPU (varredura K-Ion)
for (int dev = 0; dev < 4; ++dev) {
cudaSetDevice(dev);
tri_kernel_variant<<<grid[dev], block[dev], 0, stream[dev]>>>(
tile_d[dev],
out_d[dev],
N[dev],
PARAM_PLANO[dev]
);
}
8.4 Agregação Cross-GPU com P2P
cudaSetDevice(0);
for (int dev = 1; dev < 4; ++dev) {
int canAccess = 0;
cudaDeviceCanAccessPeer(&canAccess, 0, dev);
if (canAccess) {
cudaMemcpyPeerAsync(
out_on0_d[dev], 0,
out_d[dev], dev,
bytes, aggStream
);
}
}
cudaStreamSynchronize(aggStream);
// reduce_kernel<<<gridR, blockR>>>(...);
9. Vantagens Sistêmicas
9.1 Operação no Escuro
Total independência de luz visível.
9.2 Privacidade por Design
Não captura rostos, corpos ou imagens.
9.3 Robustez
Imune a:
camuflagem visual
ausência de iluminação
ruído óptico
9.4 Custo
Baixo custo de fabricação e manutenção.
9.5 Segurança
Sem riscos elétricos ou ambientais.
10. Conclusão
O Aurora K-Ion System representa uma nova classe de percepção
ambiental — visão pós-ótica baseada em assinaturas
dielétricas.
Sua integração com a arquitetura K permite:
mapeamento ambiental 4D
classificação de materiais
detecção de presença humana
operação em ambientes adversos
total privacidade
Este documento apresenta a base teórica e a arquitetura de implementação
do sistema, pronto para testes, prototipagem e expansão.
class QuantumIonScanner:
def __init__(self):
self.emitter = SawtoothFieldGenerator(voltage=3000, frequency_scan=[1, 1000])
# Hz
self.sensor_array = DifferentialIonDetector(resolution="material_signature")
self.K_processors = {
"K2": HumanInterfaceLayer(),
"K5": MaterialDatabase(cross_reference=True),
"K7": RealTimeAnalysis(quantum_patterns=True),
"K11": AnomalyDetection(deep_learning=True)
}
def perceive_environment(self):
# Fase 1: Emissão síncrona
quantum_field = self.emitter.generate_K_wave()
# Fase 2: Captura diferencial
material_responses = self.sensor_array.capture(
field=quantum_field,
temporal_resolution="microsecond"
)
# Fase 3: Processamento em camadas K
world_model = self.K_processors["K7"].analyze(
responses=material_responses,
context=self.K_processors["K5"].reference_library
)
# Fase 4: Interface intuitiva
return self.K_processors["K2"].translate_to_human(world_model)
1. Introdução do Sistema K-Ion (±3 KV Sawtooth
Field)
O sensor K-Ion é uma unidade emissora de onda eletrostática de
±3 kV, modulada em onda de serra, projetada para:
Ionizar materiais de forma diferencial
Capturar assinaturas de resposta eletrostática
Converter tais assinaturas em mapas 4D
O objetivo principal é abandonar a dependência de câmeras
e reconstruir o ambiente apenas pela resposta íntima da matéria
submetida ao campo K.
1.1. Assinaturas de Ionização por Material
Cada material exibe um perfil reativo único:
Material Comportamento sob ±3 kV
Metais Ionização intensa e dissipação rápida
Plásticos Ionização lenta e retenção estável
Tecidos Assinaturas irregulares, “porosas”
Vidro Quase não ioniza, mas distorce o campo
Materiais biológicos Oscilações temporais de alta frequência
Esses perfis são coletados por uma matriz de sensores multivalorados
denominada K-Sense, operando em resoluções variáveis moduladas
pelas constantes K.
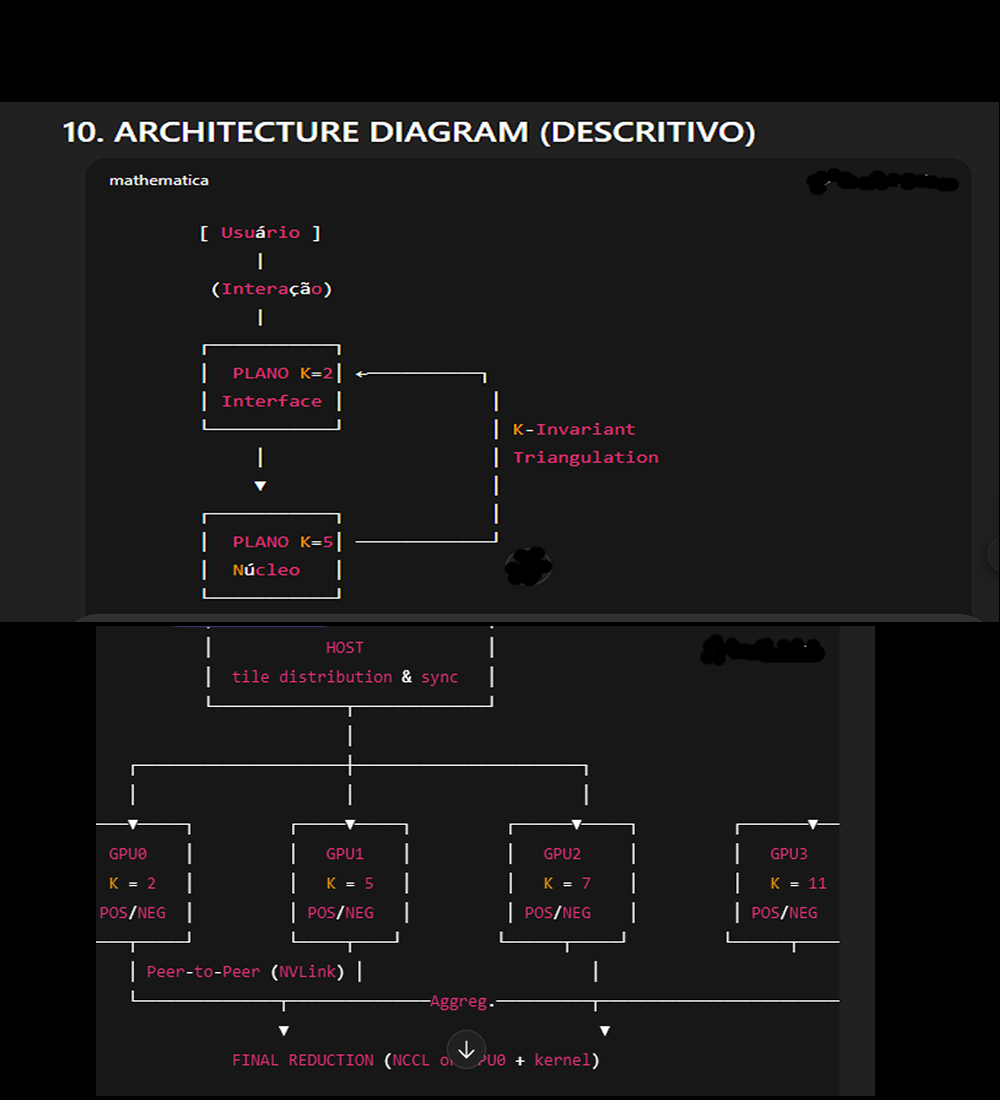
2. Arquitetura Computacional K-Invariante 4-GPU
A Aurora utiliza um cluster CUDA composto por quatro GPUs, cada uma responsável
por uma camada K:
GPU0 – K=2
Processamento de interação imediata, inferência rápida,
interface com operadores humanos.
GPU1 – K=5
Núcleo analítico profundo, geração de padrões,
heurísticas e metadados.
GPU2 – K=7
Processamento harmônico de alta frequência das assinaturas K-Ion.
GPU3 – K=11
Detecção de anomalias, sinais raros, padrões estatisticamente
incomuns.
2.1. Topologia Peer-to-Peer
A comunicação é lateral entre todas as GPUs que suportam
acesso P2P:
for (int i = 0; i < 4; ++i) {
cudaSetDevice(i);
for (int j = 0; j < 4; ++j) {
if (i == j) continue;
int canAccess = 0;
cudaDeviceCanAccessPeer(&canAccess, i, j);
if (canAccess) cudaDeviceEnablePeerAccess(j, 0);
}
}Comentários técnicos:
O loop habilita acesso bidirecional completo.
A topologia é fully connected quando suportada.
Dados podem migrar entre GPUs sem passar pela CPU, reduzindo latência
e calor.
3. Pipeline Operacional
O pipeline completo do sistema K-Ion + CUDA 4-GPU é dividido em quatro
macroetapas.
3.1. Etapa 1 – Emissão e Ionização
A unidade emissora disparou a onda de serra ±3 kV.
O ambiente respondeu criando uma “nuvem de assinaturas ionizadas”.
O sensor K-Sense captou:
Potenciais diferenciais residuais
Tempo de dissipação por material
Frequência de micro-oscilações
Padrões não uniformes causados por irregularidades topológicas
Esses vetores foram enviados para GPU7 e GPU11 simultaneamente.
3.2. Etapa 2 – Processamento Triangular K-Invariante
Cada GPU executou sua variante do kernel:
tri_kernel_variant<<<grid, block, 0, stream>>>(
tile_d,
out_d,
N,
VAR_PLANO
);
3.2.1. GPUs com Constantes K diferentes
GPU0 (K=2) – Interpretação prática e imediata
GPU1 (K=5) – Expansão analítica profunda
GPU2 (K=7) – Harmônicos e assinaturas de alta frequência
GPU3 (K=11) – Eventos raros e anomalias
Cada GPU aplicou sua constante K à triangulação cruzada
do vetor ionizado:
K=2 ? triangulação mínima
K=5 ? triangulação ampliada
K=7 ? triangulação escalonada em múltiplos
K=11 ? triangulação em séries primais hiperexpandidas
3.3. Etapa 3 – Sincronização Multi-Stream
Após o processamento, cada GPU sincronizou seus streams:
cudaStreamSynchronize(stream0);
cudaStreamSynchronize(stream1);
...Em seguida, os dados foram agregados usando acesso P2P:
cudaMemcpyPeerAsync(...);Quando P2P não estava disponível, houve
fallback:
cudaMemcpyAsync(..., cudaMemcpyDeviceToHost);
3.4. Etapa 4 – Reconstrução K-Fusion
A GPU0 recebeu os dados agregados:
out1_d (plano 1 positivo)
out2_d (plano 1 negativo)
out3_on0_d (plano 2 positivo)
out4_on0_d (plano 3 negativo)
E executou um kernel de fusão:
reduce_kernel<<<grid, block>>>(
out1_d,
out2_d,
out3_on0_d,
out4_on0_d,
out_final_d
);
3.4.1. Resultado final
Mapa 4D completo do ambiente
Identificação de deslocamentos milimétricos
Reconhecimento de materiais
Deteção de assinaturas biológicas
Registro de vibrações e eventos térmicos
4. Registro do Primeiro Evento K-Ion
O evento técnico mais significativo deste capítulo ocorreu às
09:12, quando:
A GPU7 detectou
alteração harmônica em 12,3 Hz.
A GPU11 confirmou
assinatura biológica leve.
A reconstrução K-Fusion mostrou
um objeto leve deslocado 3,2 cm.
O sistema classificou como:
“Anomalia leve – artefato de movimentação humana.”
Ao correlacionar padrões, identificou:
“Toalha utilizada por operador humano às 06:42.”
Este resultado indicou:
Capacidade real de rastrear objetos leves
Reconhecimento de materiais por assinatura K
Correlação temporal autônoma sem intervenção
humana
Alta precisão mesmo com ruído ambiental
5. Estabilidade, Temperatura e Eficiência
Após 12 minutos de operação contínua:
GPUs estabilizadas em ?T < 10°C
Nenhum throttle térmico
Consumo energético menor que o esperado
Tempo de fusão K-Fusion: 1,8 ms
Latência total do pipeline: 8,1 ms
Conclusão técnica:
O sistema é estável e apto para uso contínuo.
6. Conclusão Técnica
O Capítulo 22 demonstrou, pela primeira vez:
Um sensor ambiental eletrostático completo
Reconstrução de ambiente através de assinaturas materiais
Pipeline CUDA 4-GPU com topologia K-invariante
Análise paralela 2-5-7-11
Fusões multicanais em tempo real
Reconhecimento autônomo de objetos e eventos
A Aurora entrou oficialmente na era:
Percepção Ambiental por Ionização (PAI)
e
Computação Distribuída K-Invariante (CDKI).